Graphics
Graphics
OpenGL Graphics Pipeline
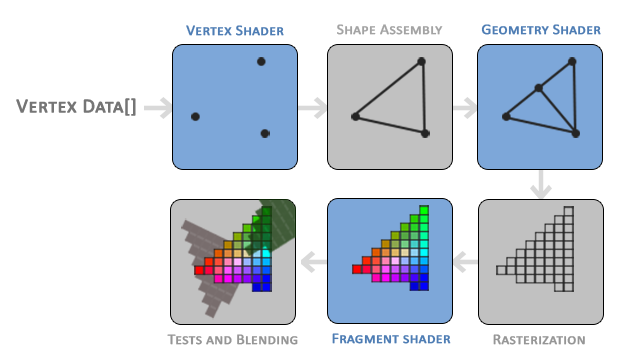
- input: array of vertices with vertex attributes, e.g. position and colour
- vertex shader: operates on a vertex, transforming between 3D coordinate systems
- also allows basic processing of vertex attributes
- primitive assembly: receives all vertices from the vertex shader to form a primitive, assembling them into the required shape (e.g. triangle)
- geometry shader: receives collection of vertices forming a primitive, and generates new shapes by emitting new vertices to form new/other primitives
- rasterisation: maps the primitives to corresponding pixels on the screen, producing fragments
- clipping is also performed, discarding fragments outside the view
- fragment shader: calculates final colour of a pixel
- typically contains data about 3D scene allowing calculation of lights, shadows, …
- alpha test and blending: checks depth of the fragment, and whether the fragment is in front/behind other objects
Shaders
Ins and Outs
in/outare input/output variables respectively- vertex shader should receive input in the form of the vertex data (otherwise it can’t do much)
- fragment shader requires
vec4colour output variable
Vertex Shader
#version 330 core
// position variable has attribute position 0
layout (location = 0) in vec3 aPos;
// specify colour output to fragment shader
out vec4 vertexColor;
void main() {
gl_Position = vec4(aPos, 1.0);
vertexColor = vec4(0.5, 0.0, 0.0, 1.0);
}
Fragment Shader
#version 330 core
out vec4 FragColor;
// input variable from the vertex shader
in vec4 vertexColor;
void main() {
FragColor = vertexColor;
}
Uniforms
uniforms are- global
- maintain value until they are reset/updated
Sources
Transformations
Homogeneous coordinates
- in order to do matrix translations, an additional coordinate is needed
- the homogeneous coordinate $w$ is added as a component of the vector
- the 3D vector is derived by dividing the $x,y,z$ components by $w$, but usually $w = 1$, so no conversion is required
- if $w$ is 0, the vector is a direction vector as it cannot be translated
Scaling
Scaling by $(S_1, S_2, S_3)$ on a vector $(x,y,z)$ can be done with the following matrix:
\[\begin{bmatrix} S_1 & 0 & 0 & 0 \\ 0 & S_2 & 0 & 0 \\ 0 & 0 & S_3 & 0 \\ 0 & 0 & 0 & 1 \\ \end{bmatrix} \cdot \begin{bmatrix} x \\ y \\ z \\ 1 \\ \end{bmatrix} = \begin{bmatrix} S_1x \\ S_2y \\ S_3z \\ 1 \\ \end{bmatrix}\]Translation
- translation of a vector by $(T_x, T_y, T_z)$ can be achieved with the following matrix: \(\begin{bmatrix} 1 & 0 & 0 & T_x \\ 0 & 1 & 0 & T_y \\ 0 & 0 & 1 & T_z \\ 0 & 0 & 0 & 1 \\ \end{bmatrix} \cdot \begin{bmatrix} x \\ y \\ z \\ 1 \\ \end{bmatrix} = \begin{bmatrix} x + T_x \\ y + T_y \\ z + T_z \\ 1 \\ \end{bmatrix}\)
Rotations
- specified with an angle and a rotation axis
- rotation about the $x$-axis:
- there are similar matrices around the other axes
- by combining these matrices you can achieve arbitrary rotations
- gimbal lock is possible using this approach, can be avoided by quaternions