Design of Algorithms
Algorithms
Algorithms
Table of Contents
- Algorithms
- Greatest common divisor
- Sieve of Eratosthenes
- Algorithmic Problem Solving
- Important problem types
- Linear data structures
- Graphs
- Trees
- Sets and Dictionaries
Algorithms
- Sequence of unambiguous instructions for solving a problem to obtain required output for legitimate input in a finite amount of time
- multiple valid solutions with different efficiency
Greatest common divisor
Euclid’s algorithm gcd(m, n) = gcd(n, m mod n)
For example
gcd(24, 60) = gcd(60, 24)
= gcd(24, 12)
= gcd(12, 0)
= 12
Since gcd(m, 0) = m
Sieve of Eratosthenes
- algorithm to generate consecutive primes not exceeding a given integer
n > 1 - procedure:
- generate a list of prime candidates from 2 to n
- loop over the list, each time eliminating candidates that are multiples of 2, 3, …
- no pass for 4 is necessary as all multiples of 4 have already been eliminated
- algorithm continues until no more numbers can be eliminated; remaining numbers are prime
- what is largest
pwhose multiples can still remain on the list to make further iterations of the algorithm necessary?- if
pis a number whose multiples are being eliminated on the current pass, first multiple we should consider isp.pbecause all smaller multiples2p, ..., (p-1)phave been eliminated on earlier passes p.pshould be less thannotherwise it isn’t a candidate, i.e.
p \leq \lfloor\sqrt{n}\rfloor - if
Algorithmic Problem Solving
- understand the problem
- understand the capabilities of the hardware
- decide between exact/approximate solution
- choose design techniques
- design algorithm and data structure
- prove correctness: prove that algorithm yields required result for every
legitimate input in finite time
- often uses mathematical induction
- for approximation algorithms you need to show error does not exceed defined limit
- analysis
- time efficiency: run time
- space efficiency: memory
- generality
- implement the algorithm
Important problem types
- sorting: rearrange list items in non-decreasing order
- stable: preserves relative order of equal elements
- typically algorithms that switch keys far apart are not stable but are faster
- in-place: doesn’t require extra memory to run
- searching: find a given value (search key) in a given set
- string processing
- e.g. string matching
- graph problems
- graph is a collection of vertices, connected by edges
- e.g. graph traversal, shortest path
- graph-coloring: assign smallest number of colors to vertices of a graph such that no two adjacent vertices are the same color (event scheduling)
- travelling salesman problem: shortest tour through n cities that visits each city only once
- combinatorial problems
- ask to find a combinatorial object satisfying constraints (e.g. permutation, combination, subset)
- typically most difficult class of problems: number of objects grows extremely fast with problem size
- geometric problems: points, lines and polygons
- e.g. computer graphics, robotics, tomography
- closest-pair problem: given n points in the plane, find the closest pair among them
- convex-hull problem: smallest convex polygon that contains all points of a set
- numerical problems: mathematical objects of continuous nature
- solving systems of equations, computing integrals, evaluating functions
Linear data structures
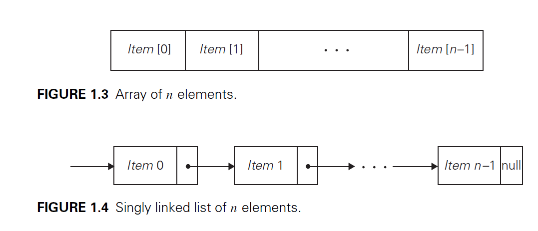
Array
- sequence of
nitems of the same data type stored contiguously in memory - accessible by index
- each element of an array can be accessed by an identical constant amount of time (c.f. linked lists)
- useful for strings
Linked list
- sequence of nodes each containing data and pointers to other nodes
- singly linked list: each node (except last) contains a single pointer to the next element
- nodes are accessed by traversing the list: time dependent on node’s location
- doesn’t require preliminary reservation of memory
- efficient insertions and deletions
- header: special node at start of list, points to first item in list, could
contain:
- metadata about list e.g. current length
- pointer to last element in list
- doubly linked list: each node contains a pointer to the next and previous node

List
- list: finite sequence of data items
- operations:
- search for
- insert
- delete
Stacks
- stack: list in which insertions and deletions are performed at the end
(top) of the list
- last-in-first-out
- picture vertical stack of plates
Queue
- queue: elements added to rear, and removed from the front
- dequeue: elements deleted from the front
- enqueue: elements added to the rear
- first-in-first-out
- think queue of customers in line
Priority queues
- priority queue: useful for selection of an item of highest priority from
dynamically changing candidates
- collection of data items from a totally ordered universe (e.g. integer/real numbers)
- operations:
- find largest element
- delete largest element
- add a new element
- heap is the most efficient solution to this problem
Graphs
- collection of points, called vertices or nodes, with some connected by edges
- a graph \(G = \langle{V,E}\rangle\), is a pair of two sets
- finite nonempty set V, vertices
- set E of pairs of these items, edges
- if these pairs of vertices is unordered i.e. \((u, v)\) is the same as \((v, u)\), v and u are adjacent, connected by undirected edge \((u,v)\)
- vertices u and v are endpoints of edge \((u, v)\)
- u and_v_ are incident to this edge (and vice versa)
- a graph is undirected if all edges are undirected
- directed edge \((u, v)\) means vertices \((u, v)\) are not the same as vertices \((v, u)\)
- from tail u to head v
-
a graph is directed if all edges are directed (aka digraphs)
- convenient to label vertices with letters or numbers
- graph with 6 vertices and 7 undirected edges
V = \{a, b, c, d, e, f\}
\newline
E = \{(a,c), (a,d), (b,c), (b,f), (c,e), (d,e), (e,f)\}

- digraph with 6 vertices and 8 directed edges
V = \{a, b, c, d, e, f\}
\newline
E = \{(a,c), (b,c), (b,f), (c,e), (d,a), (d,e), (e,c), (e,f)\}

- this definition allows loops, including edges connecting vertices to themselves, however unless stated will be expected to have no loops
- definition disallows multiple edges between the same vertices of an undirected graph:
- number of edges \(\mid E\mid\)
- number of vertices \(\mid V\mid\)
- \[0 \le \mid E\mid \le \mid V\mid \frac{(\mid V\mid -1)}{2}\]
- graph is complete if every pair of vertices is connected by an edge
- complete graph with \(\mid V\mid\) vertices: \(K_{\mid V\mid }\)
- graph with few missing edges is dense
- graph with few edges present is sparse
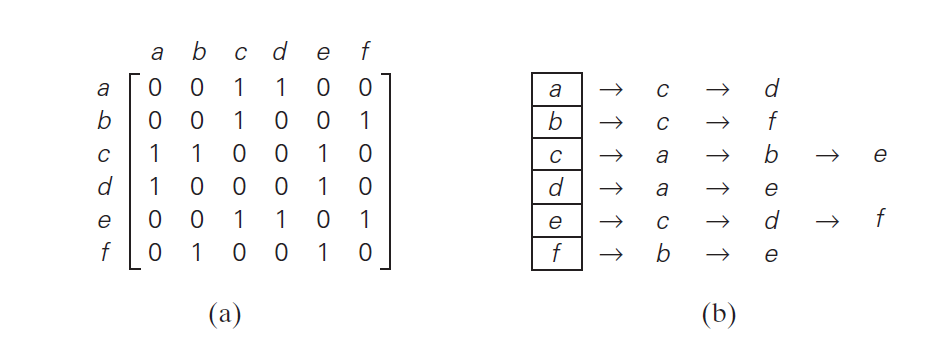
Graph representations
- adjacency matrix: for graph with \(n\) vertices is \(n \times n\) boolean
matrix
- row i, col j: 1 if edge from i to j; 0 otherwise
- undirected graph has a symmetric adjacency matrix \(A_{ij}=A_{ji}\) for all i, j
- adjacency list: collection of linked lists for each vertex containing all adjacent vertices (those connected by an edge)
- sparse graphs more efficiently represented by adjacency list
- dense graphs more efficiently represented by adjacency matrix
Weighted graphs
- weighted graph: graph with numbers (weights, costs) assigned to edges
- adjacency matrix can be updated to a weight matrix such that \(A_{ij}\) is the weight for that edge
- if there is no such edge, entries are \(\infty\)
Paths and Cycles
- path from vertex u to vertex v of graph G: sequence of adjacent vertices from u to v.
- simple path: all vertices of a path are distinct
- path length: (num. vertices)-1, (num. edges)
- directed path: sequence of vertices, with each successive pair of vertices u, v having a directed edge (u,v)
- connected graph: for every pair of vertices u,v there is a path from u to v
- i.e. no unreachable vertices
- a disconnected graph forms multiple connected components: maximal connected subgraphs of a graph
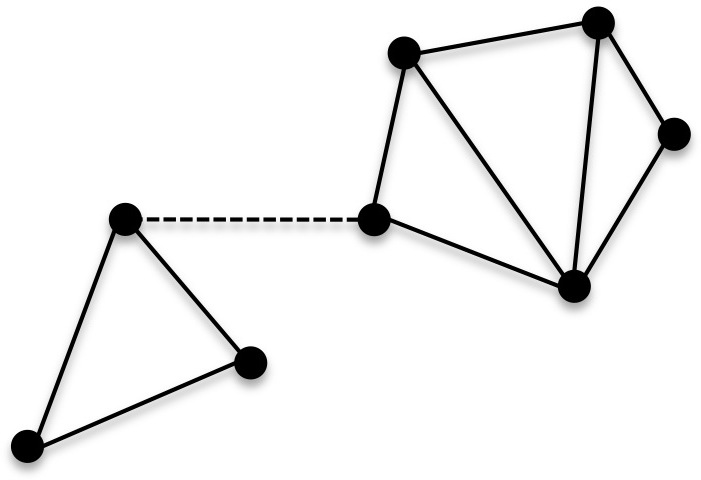 Graph becomes disconnected when dashed line is removed
Graph becomes disconnected when dashed line is removed
- cycle: path of positive length that starts and ends at the same vertex, without traversing the same edge more than once
- acyclic: graph without cycles
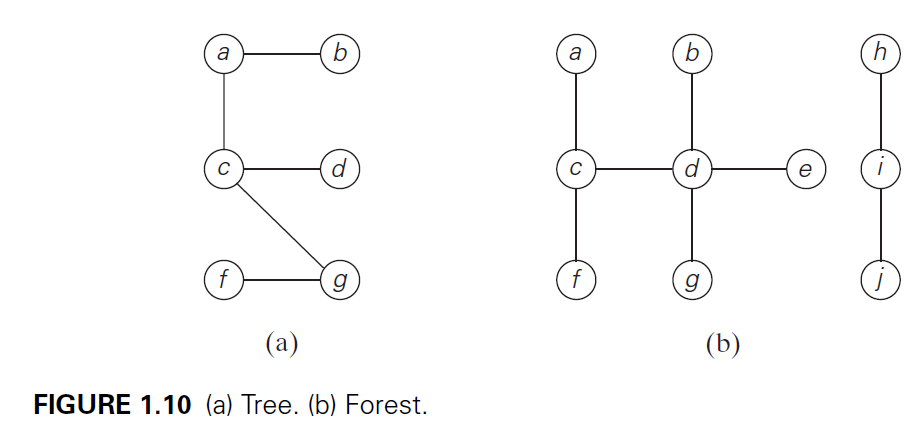
Trees
- free tree, aka tree: connected acyclic graph
- Necessary property for graph to be a tree:
- (number of edges) = (number of vertices) - 1
- \[\mid E/\mid = \mid V\mid - 1\]
- For connected graphs this is a sufficient property; useful for checking if a connected graph has a cycle
- Necessary property for graph to be a tree:
- forest: graph with no cycles but is not necessarily connected, with each component being called a tree
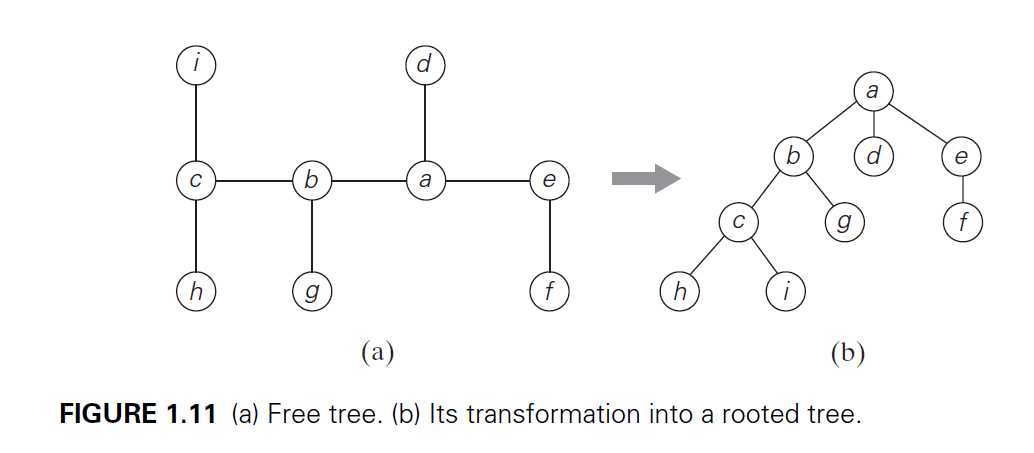
Rooted trees
- for every two vertices in a tree, there exists exactly one simple path from one vertex to the other
- can select arbitrary vertex in a free tree as root of the rooted tree
- e.g. file system hierarchy
- ancestor of vertex v: all vertices on simple path from root to vertex v
- vertex usually considered its own ancestor
- proper ancestor excludes the vertex itself
- if \((u,v)\) is the last edge of simple path from root to vertex v
- u is parent of v
- v is child of u
- sibling: vertices with same parents
- leaf: vertex with no children
- parental: vertex with at least one child
- descendants: all vertices for which v is an ancestor
- proper descendants: excludes v itself
- subtree rooted at v: all descendants of v with all edges connecting
- depth of a vertex v: length of simple path to v
- height of a tree: longest simple path from root to leaf
Ordered trees
- ordered tree: rooted tree in which all children of each vertex are ordered
- binary tree: ordered tree where each vertex has at most two children
- each child is a left child or a right child
- binary tree with root at left child of a vertex in a binary tree is the left subtree
- as subtrees are also binary trees, they are useful for recursive algorithms
- inequality for height h of a binary search tree with n nodes: \(\lfloor \log_2 n \rfloor \leq h \leq n-1\)
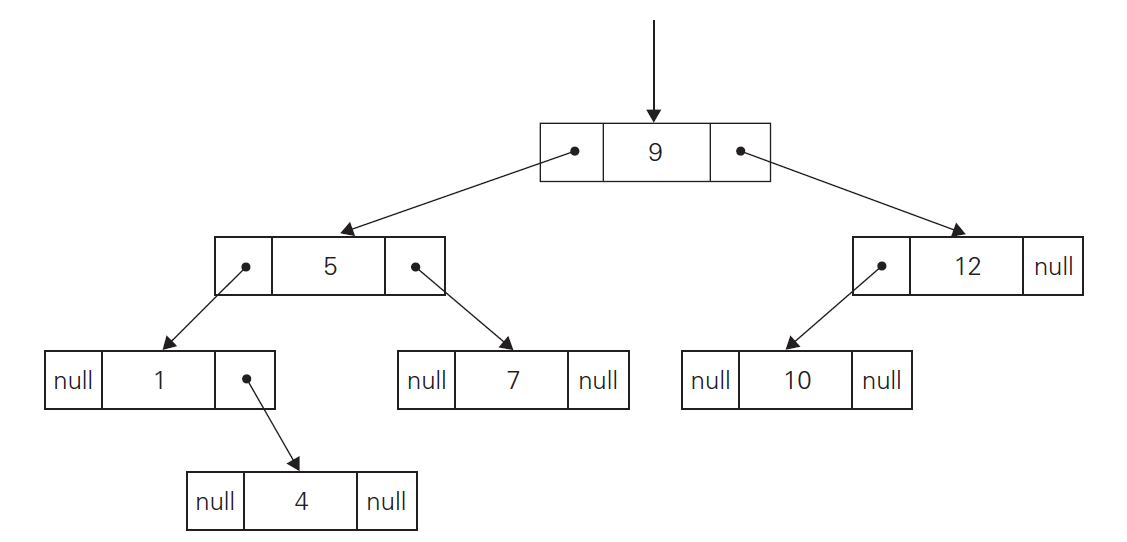
- binary search tree: numbers assigned to vertices, with parent vertex being larger than all elements in left subtree, and smaller than all elements in right subtree
- multiway search tree: generalisation of binary search trees
- useful for efficient access to very large datasets
- first child-next sibling representation: left subtree of vertex is child,
while right subtree is siblings.
- useful for computer representation of an arbitrary ordered tree with widely varying numbers of children by converting to a binary tree
Sets and Dictionaries
- set: unordered collection of distinct elements
- operations:
- checking membership
- finding union
- finding intersection
Universal set
- consider large set U with n elements
- bit vector: subset S of U can be represented by bit string of size n
e.g.
\[U = \{1, 2, 3, 4, 5, 6, 7, 8\} \newline S = \{2, 3, 7\}\]- bit string: 01100010
- these set representations allow very fast set operations but with high memory use
List structure
- more common approach for handling sets
- multiset/bag: circumvents uniqueness set requirement with an unordered collection of items that are not necessarily distinct
- lists are ordered, where as sets are not: largely this doesn’t matter for practical purposes
Dictionary
- dictionary: data structure that implements most common set operations:
- searching for an item
- adding items
- deleting items
- many implementations, from arrays to hashing and balanced search trees